飞行原理—失速
飞行原理—失速
在之前的文章中我们说过要详细解释一下失速,这一篇文章,我们就把这个坑填上,并详细说明失速的原因、标志、检测失速的方法、影响失速速度的参数以及延迟失速的装置。
失速是因为迎角超过一个给定的值(即失速迎角αstall)导致的。此时,不再有足够的空气粘附在机翼翼面上,并且边界层与上翼表面开始过早的分离。
当迎角非常高的时候(大约15°),升力系数突然降低,因此升力也突然降低,升力与重力不再平衡,最终飞机掉落,失去高度。
为了安全起见,一般将失速迎角定义为最大升力系数(CLmax)对应的迎角,而不是飞机实际失速时稍高的极限迎角。(记住这一条哦,以后不困惑)
在迎角足够高的情况下,飞机能够在任何速度和任何高度失速。
由上一篇文章可知,平飞失速时的升力系数:CL=CLmax。
飞机平飞时升力等于重力:
因此:
这个速度也被称为Vs1g,因为它对应的飞行载荷系数等于1(升力与重力之比)。从公式中可以看到,速度与质量及飞行高度(因为高度与密度相关,但密度不容易观察,所以这里我们用高度代替密度)有关,另外与失速迎角不同的是,对于给定的配置(指迎角、翼型和机翼形状不变),高度一定时,失速速度不变。
实际上,当飞行员意识到失速时,速度仍在持续下降,直到降到一个低于Vs1g的最小值Vmin以下。
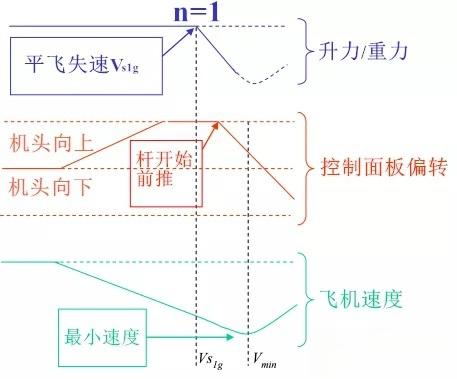
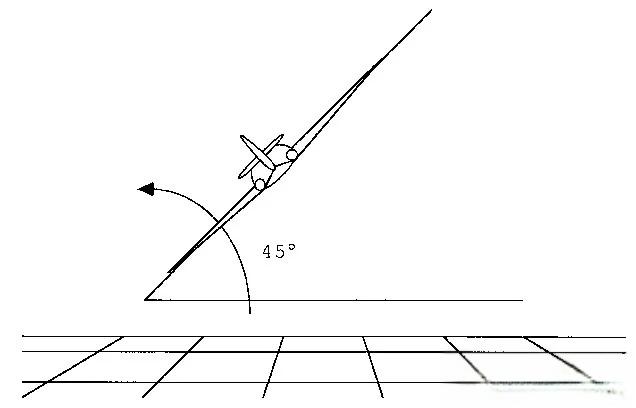
下面我们详细解释一下上图,在开始解释之前,一定要记住即使机头有向上或向下运动,飞机始终都是平飞的,有了这个情景意识,我们再看下面的解释。
这张图上下三行我们一起从左向右看,最左边为飞机起初平稳正常飞行状态,然后飞行员逐渐拉升机头,此时飞机的载荷系数n仍然等于1,但由于机头向上带来的迎角增加,飞机保持平飞的最小速度开始降低。
当超过临界迎角,机头仍在向上。飞行员意识到失速时,开始前推杆,机头首先减速上扬,在不再继续上扬之前(即仰角停止增加之前),飞机的最小平飞速度仍在降低。在机头开始停止继续上扬那一刻,达到最小平飞速度Vmin,载荷系数也达到最低。
飞行员继续前推杆,仰角有减小的趋势,并缓慢减小,最小平飞速度增加,载荷系数也开始增加。
为了留有一定的安全余量,定义了一个最小速度,基准失速速度VSR:是申请人确定的校正空速。VSR不得小于Vs1g失速速度。
由于失速会非常可能导致危险发生,因此飞行员必须提前得到失速警告以避免失速的发生。失速的标志是由以下三种单独或联合发生:
(1)前推杆时机头向下变得困难
(2)震动(由气面分离导致);但是有些飞机的震动不强,飞行员不容易察觉到,因此必须安装失速探测与报警装置
(3)在从失速恢复出来之前的一小段时间内,机头有一段减速上扬的现象,在操控杆完全被控制之后,机头停止继续上扬(还是有仰角,只是仰角不再增大)。
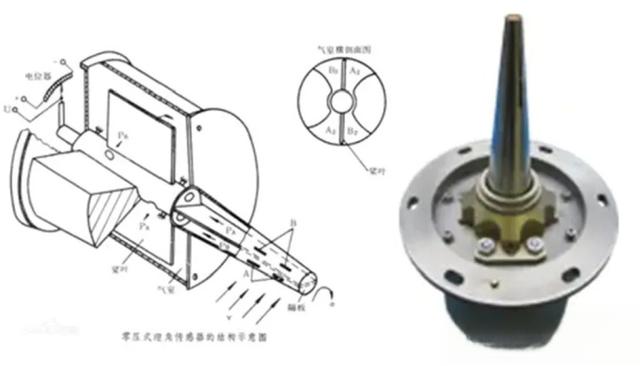
记住第三点:很多考生会在这里出错。第一种迎角传感器类似叶片挡板开关(flapperswitch),如下图所示,这种探测器的工作原理是当迎角足够大的时,驻点位于偏转片的下方,此时气流把偏转片向上“吹”,触动探测器内部线路的连接,因此这种装置实际上相当于一个偏转开关,这种迎角传感器常用在小飞机上。

工作原理图:

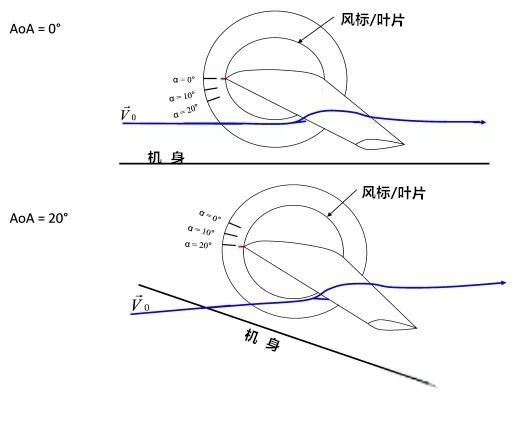
第二种迎角传感器为风标式迎角传感器(AOAVane):
风标式迎角传感器是通过一个相对于机身可以自由旋转,且与相对气流对准的叶片,来提供迎角值。
风标式迎角传感器
由对称剖面的翼型叶片(即风标)、转轴、角度变换器、配重等部分组成。分单风标与双风标两种,后者是迎角和侧滑角的组合传感器。单风标式迎角传感器多装于飞机侧面,而双风标式传感器常与空速管组合在一起,安装在机头前的撑杆上,由于远离机头,处于较平稳的气流中,感受飞机迎角比较准确。风标式迎角传感器的结构比较简单,工作可靠,但对翼型剖面的加工和表面光洁度的要求很高。
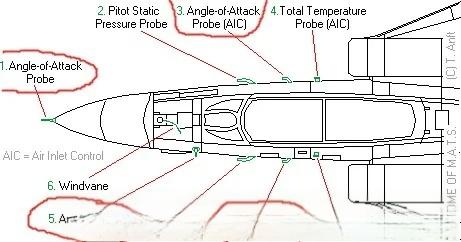
但是对于一架飞机来说,有可能会有很多类似风标式迎角传感器的装置,因此要注意区分它们,如下图所示:

1-7分别为:
第三种迎角传感器为零压式迎角传感器(AOAProbe)
其安装位置可位于机头或机身,如下图1、3、5所示:
警告飞行员飞机接近失速迎角有以下几种方法:
(1)视觉或/及听觉警告:此种方法触发警告的速度通常为高于失速速度至少5%。
(2)抖杆:这种告警通常由飞机的装置激活,其告警速度Vwarning为超过VSR5Kt或5%(取最大值),这种报警装置常被用在容易有“严重失速”趋势的飞机上,比如具有T型尾翼的飞机。
VSR:参考失速速度
在本文的第二部分我们已经了解过,失速速度的公式为:
根据这个公式可知Vs取决于飞机的重量、空气密度(密度又取决于飞机所飞的高度)、翼面积、最大升力系数CLmax(因此影响CLmax的也会影响Vs,比如翼型)。下面让我们来看看这些因素是如何影响失速速度:
(1)重力和翼载荷
从公式中可以看出,飞机越重,Vs越大。准确的说,飞机质量越大,翼载荷(mg/S)越大,Vs也就越大。
(2)高度
飞机飞的高度越高,密度越低,Vs也就越大。
(3)飞机的机动
飞机在机动(比如转弯、拉升)过程中,飞机的翼载荷会增加,正如上面第一条所说,翼载荷增加,Vs就增大。
飞机在机动飞行过程中,由于惯性作用,导致飞机的在重力方向上的合力增加,而升力为了平衡这个合力也会增加。因此机动飞行时的升力会比飞机本身的重力大。为了量化额外增加的升力,人们提出了载荷系数n:升力与重力之比,n=L/mg
因此在机动飞行过程中,失速速度为:
或
推导过程如下图:
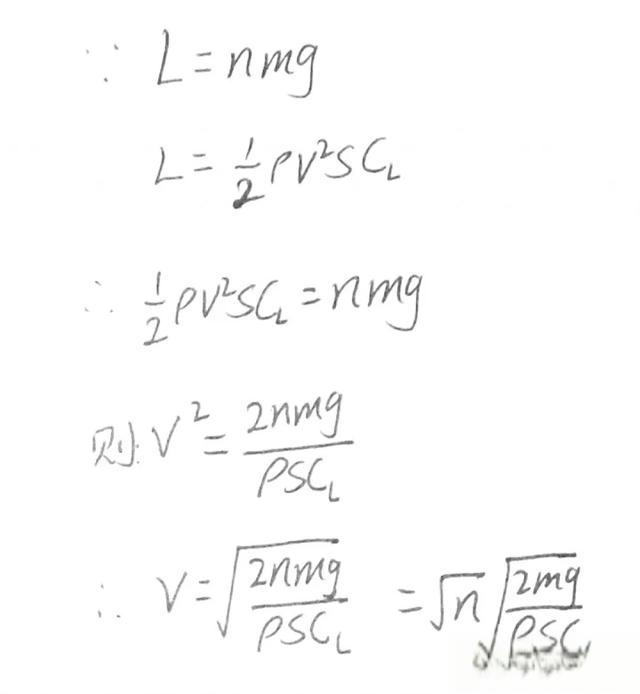
在没有外界干扰的情况下,载荷系数取决于飞机如何机动飞行,请记住:转弯或拉升会使载荷系数增加。
飞机在稳定平稳飞行时,若转弯,失速速度会增大。
操控面的快速移动也会造成载荷系数增大,则失速速度也会相应的增大。
(4)重心位置
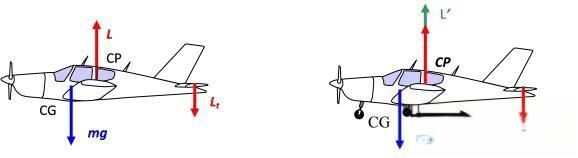
飞机的重力是过重心CG的力,而升力是过压力中心CP的点,通常压力中心位于重心之后。
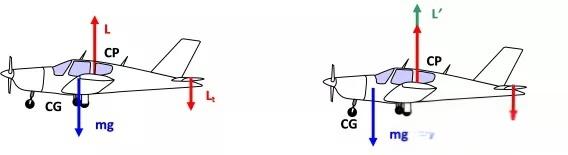
根据上图进行分析可知,若增大CG与CP之间的距离(重心前移),为了使CP点前后的力矩相等,因此在水平尾翼上会增加一个向下的力,则向下的合力增加,相应地向上的合力也会增加,即过CP的升力增加,则载荷系数n增大。因此重心前移,失速速度增加。
(5)起落架装置
飞机放下起落架,会导致CP前逆时针偏转的力矩增加,为了保持平衡,尾翼上向下的力则会增加。由于整个飞机向下的合力增加,为了使飞机保持在所在的平面飞行,向上的升力也会增加,此时载荷系数增大,失速速度增加。因此起落架放下,失速速度会增加。
(6)发动机功率
这条规律是发动机正常工作时的失速跟发动机怠速时相对比的,发动机的功率对失速的影响主要有两条:
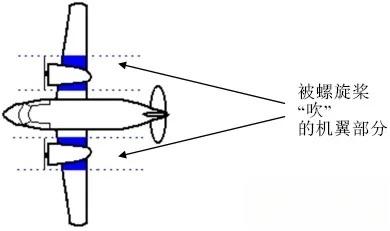
1.对螺旋桨飞机来说,发动机工作时将会有更多的空气被“吹”上机翼上表面,气流被发动机进一步加速,导致机翼产生的升力增加。因此,对螺旋桨飞机来说,发动机功率增加,失速速度将降低。
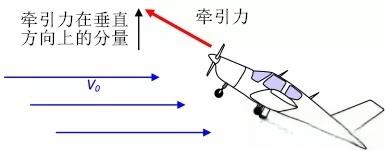
2.当发动机产生的推力或牵引力在垂直方向上有分力的时候,失速迎角可以更大。同时推力在垂直方向上的分力其作用相当于增加了升力,这使机翼可以产生更少的升力来保持飞机平稳飞行。
因此,发动机产生的推力或牵引力在垂直方向上有分力的时,飞机的失速速度会降低。
(7)马赫数
当飞机的飞行马赫数大于0.7或飞机“跨音速飞行”时,会产生激波阻力,此时机翼的:阻力系数增加,升力系数降低。因此,跨音速飞行时,马赫数增加,失速速度增大。
跨音速飞行指:航空器表面既有亚音速气流,又有超音速气流;
(8)雾凇或积冰
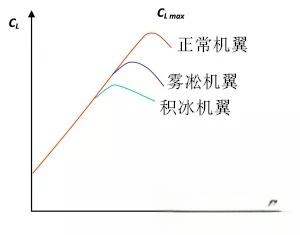
当机翼上有雾凇或积冰时,根据研究飞机的CLmax将会降低,失速速度增加。机翼的前缘是产生雾凇或积冰的主要区域。
从下图我们可以看出机翼上有雾凇或积冰时,其临界迎角所对应的迎角也会降低。
综上所述,失速速度增加,当:
重力增加
翼载荷增加
高度增加
机动飞行(拉升或转弯)
重心迁移
起落架放下
发动机功率降低
雾凇或积冰
除此以外,还包含跨音速飞行时的“高马赫数”失速。
失速警告后改出:在上面的内容中我们已经知道,当迎角接近临界迎角时,失速警告被激活。因此从失速中改出最重要的措施是降低迎角(飞行员前推驾驶杆)。但是前推驾驶杆迎角降低,会导致升力也随之降低,因此驾驶员必须增加功率以保证飞机保持在当前的高度飞行。所有的这些操作必须非常柔和,不要动作过大或过快,要缓慢推杆,缓慢增加功率,不然可能导致飞机进入“失速螺旋”,此时也要谨慎使用副翼,避免飞机滚转(roll)。
如果飞机失速时带有一定的倾角(BankAngle),飞行员可能会使用副翼使机翼保持水平,那么此时会发生什么呢?
我们以上图为例,为了使机翼水平,飞行员必须增加左边机翼的升力,因此左边的副翼将会向下偏转。
请注意此时翼型的变化,向下偏转的副翼,将会导致有效迎角更大,但由于机翼迎角已经接近失速迎角,因此增大的有效迎角可能会导致左边机翼更加接近失速,甚至直接导致失速。这导致左边机翼的升力会更低,因此飞机的倾斜角将会进一步增大,左边机翼将会更低。
因此,飞机接近失速时使用副翼可能会产生与我们预期相反的效果。这种现象在失速转弯时是非常危险的,为了避免这种现象发生,在失速改出时要先前推杆减小迎角(这样使用副翼的时候,有效迎角就不会超过临界迎角了),然后增加发动机功率(使飞机保持在当前的高度),最后再使用副翼。自动推杆器激活后改出:当达到临界迎角后将激活自动推杆器。此时操控杆将会自动前推,使机头下降,减小迎角。当迎角到达安全值后,自动推杆器将断开,在这个过程中千万不要逆向拉杆。断开后再采用与上述“失速警告后改出”相同的操作程序。功率设置的影响:改出失速操作的第一步不是增加功率的原因,是由于增加功率会产生一个抬头力矩(前提是发动机位于重心之前),这会导致失速更加严重,因此失速改出要首先减小迎角。另外,对于螺旋桨飞机来说在低速失速时,如果发动机满功率运行,将会造成非常强的发动机诱导影响,所以要平滑缓慢的增加功率。
在机翼的某些部分,除了优化机翼的形状外,还可以使用一些设备来延迟气流分离(从而延迟失速)。这些装置的基本原理通常是产生涡流,从而使气面分离点更加靠近后缘,下面给出几个例子:
(1)涡流发生器(VortexGenerator:VG):是一种空气动力学装置,由通常附在升力表面上的小叶片组成。当机翼或机体相对于空气运动时,VG会产生涡旋,该涡旋通过移除部分缓慢移动的边界层来延迟局部气面分离以及失速,从而提高机翼和操纵面(如襟翼,升降舵,副翼和方向舵)的效率。该装置如下图所示:

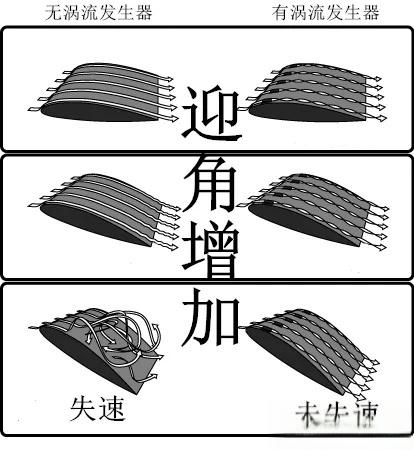
下面这个视频非常好的对比了有无涡流发生器时,翼面气流状态和失速现象。可以帮助大家非常好的了解涡流发生器的作用:
(2)翼刀(Wingfence):是机翼上一种用于控制附面层移动的简易挡板结构。
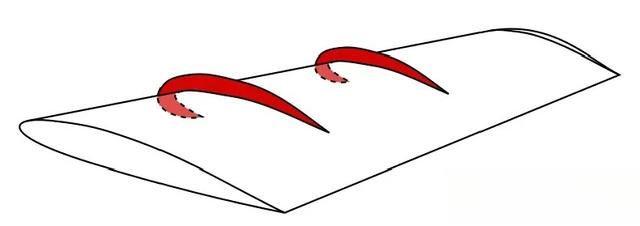
一般的平直翼和后掠翼,机翼上表面的气流会自动向翼梢流动,相应的,附面层也会逐渐向翼梢堆积。这些气流最终会在翼梢分离,从而降低飞机的升力。此外,气流在翼梢的分离会造成很大的滚转力矩,容易使飞机进入尾旋。这种状况在大后掠角机翼上尤为明显。

若在机翼的上表面,沿着翼弦的方向放置具有一定高度的挡板,就可以阻碍上翼面的附面层向翼梢移动,从而阻止或者延缓分离的发生。这样的装置就是翼刀。
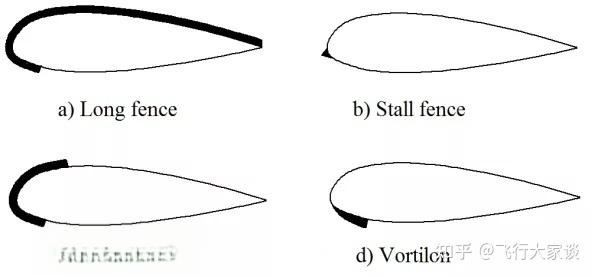
(3)涡流器(Vortilons):一种类似翼刀的装置,只是其位于机翼前缘的下表面,这种装置可以在上表面创造非常强的涡流。发动机吊舱也具有相同的效果,即在高攻角下防止气流向翼展方向流动,延迟失速。


这里我们找到一张图片,帮助大家区分fence和Vortilons,如下图所示:
前缘锯齿(leadingedgesawtooth):为防止翼梢气流分离,位于后掠翼或三角翼的外侧相对于内侧设置的突出前缘。其产生强烈的涡流,阻止分离的扩散。


(4)失速条(Stallstrip):用于改变机翼的失速特性,使翼根比翼尖先失速,避免翼尖先失速时副翼失去作用导致飞机失控。


标签: